Views: 36
– O aluno de doutorado da EPFL aprimorou a precisão e a confiabilidade do mapeamento de drones – uma técnica que está ganhando força em muitos setores da sociedade.
Cortesia EPFL de Sandrine Perroud: Tornar o mapeamento de drones mais preciso é um dos objetivos do Laboratório de Engenharia Geodésica (Topo), administrado por Bertrand Merminod na Escola de Arquitetura, Engenharia Civil e Ambiental (ENAC) da EPFL. Os drones não são apenas brinquedos para crianças grandes e pequenas – eles também servem a muitos propósitos práticos.
Eles podem ser usados para monitorar barragens e ferrovias, a fim de evitar acidentes ou criar cópias digitais em 3D de monumentos históricos, caso sejam destruídas acidental ou deliberadamente. Eles também podem capturar imagens de uma estação para a outra para medir a erosão do solo.
“É muito importante ser o mais preciso possível”, diz Emmanuel Cledat, que acaba de concluir sua tese de doutorado no laboratório Topo. “Quando parece que um penhasco se moveu ligeiramente durante o inverno, você precisa saber se é uma mudança topográfica real ou apenas um erro de georreferenciamento”. Cledat passou os últimos quatro anos desenvolvendo software capaz de processar com precisão os dados adquiridos por sensores embutidos em drones.Ele recebeu o Best Young Author Award 2020 da Sociedade Internacional de Fotogrametria e Sensoriamento Remoto (ISPRS) por um artigo sobre seu projeto de tese.
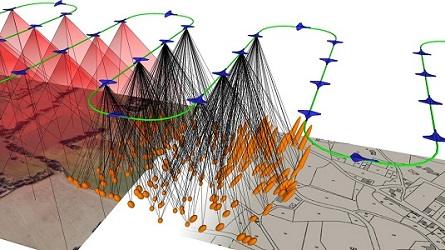
Os aviões e helicópteros usados para o mapeamento geralmente são equipados com quatro tipos de sensores: um GPS (ou GNSS) e uma unidade de medida inercial (IMU), que determinam a posição e a orientação do veículo; uma câmera; e um scanner a laser LIDAR, que mede as distâncias registrando o tempo necessário para o feixe de laser viajar do scanner para o objeto e vice-versa.
Um dispositivo híbrido e miniaturizado
Até recentemente, os scanners a laser LIDAR podiam pesar até 10 quilos. O laboratório Topo, em conjunto com a Helimap System SA, spin-off da EPFL, foi pioneiro no desenvolvimento de sistemas de mapeamento aéreo envolvendo helicópteros, que podem transportar equipamentos pesados como um scanner LIDAR e uma IMU de nível de navegação. Mas, nos últimos anos, profissionais e pesquisadores do setor têm se concentrado em tornar esses dispositivos de medição muito menores. O Cledat foi capaz de hibridar os dados adquiridos por sensores miniaturizados incorporados a um drone (GNSS, LIDAR, IMU e câmera), de modo que o mapa resultante seja quase tão preciso quanto os obtidos com um helicóptero. Uma técnica de mapeamento baseada em drones é uma alternativa mais ecológica e mais adequada para terrenos de difícil acesso.
Como parte de sua tese, Cledat calibrou cuidadosamente cada sensor para torná-lo o mais eficaz e confiável possível. Para fazer isso, ele usou os campos de calibração do laboratório perto de Vufflens-la-Ville, no Vaud Canton. Ele ganhou o prêmio ISPRS por seu trabalho na calibração de câmeras. O software de ajuste de pacote que ele desenvolveu é usado para verificar cruzadamente as medições, a fim de corrigi-las todas simultaneamente. Isso resulta em uma imagem precisa da área e da posição e orientação do drone. O software da Cledat será desenvolvido no laboratório como parte de outro projeto de tese.
Na continuidade de sua carreira, o pesquisador deseja coletar dados sobre o retorno do solo. Ajudar pessoas que não se atrevem a andar de bicicleta na cidade. Equipando uma bicicleta com sensores em miniatura adaptados para drones e complementando-os com sensores de ruído e qualidade do ar, ele deseja mapear o tráfego urbano e quantificar os perigos potenciais aos quais os ciclistas estão expostos, a fim de adaptar campanhas direcionadas de infraestrutura e prevenção de estradas no oeste. Lausanne.
Referências:
- Emmanuel Cledat, “Sobre o ajuste, calibração e orientação da fotogrametria por drone e digitalização a laser”, tese sob a supervisão de Jan Skaloud e Davide Antonio Cucci, EPFL, maio de 2020.
- Emmanuel Cledat, Davide Antonio Cucci, Jan Skaloud, “Modelos e métodos de calibração de câmera no mapeamento de corredores com UAVs”, Anais ISPRS de Fotogrametria, Sensoriamento Remoto e Ciências da Informação Espacial, XLIII, 2020.
- Cledat, J. Skaloud, “Fusão de fotos com varredura a laser no ar”, ISPRS Annals of Photogrammetry, Sensoriamento Remoto e Ciências da Informação Espacial, XLIII, 2020.
- Cledat, D. A. Cucci, “Mapeando ambientes restritos ao GNSS com um conjunto de drones e controle indireto de posição”, ISPRS Annals of Photogrammetry, Sensoriamento Remoto e Ciências da Informação Espacial, vol. IV-2 / W3, pp. 1-7, 2017.
Artigo relacionado: Um futuro com “drones sociais”