Visitas: 80
– El estudiante de doctorado EPFL ha mejorado la precisión y fiabilidad del mapeo de drones, una técnica que está ganando terreno en muchos sectores de la sociedad.
Cortesía de EPFL por Sandrine Perroud: Hacer que los mapas con drones sea más preciso es uno de los objetivos del Laboratorio de Ingeniería Geodésica (Topo), que es dirigido por Bertrand Merminod dentro de la Escuela de Arquitectura, Ingeniería Civil y Ambiental (ENAC) de EPFL. Los drones no son solo juguetes para niños grandes y pequeños, sino que también tienen muchos propósitos prácticos.
Se pueden usar para monitorear presas y ferrocarriles para prevenir accidentes, o para crear copias digitales en 3D de monumentos históricos en caso de que se destruyan accidental o deliberadamente. También pueden capturar imágenes de una estación a la siguiente para medir la erosión del suelo.
«Es muy importante ser lo más preciso posible», dice Emmanuel Cledat, quien acaba de completar su tesis doctoral en el laboratorio Topo. «Cuando parece que un acantilado se ha movido ligeramente durante el invierno, debes saber si es un cambio topográfico real o simplemente un error de georreferenciación». Cledat ha pasado los últimos cuatro años desarrollando software capaz de procesar con precisión los datos adquiridos por sensores integrados en drones. Recibió el Premio al Mejor Joven Autor 2020 de la Sociedad Internacional de Fotogrametría y Teledetección (ISPRS) por un artículo sobre su proyecto de tesis.
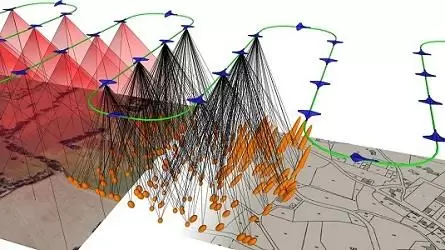
Los aviones y helicópteros utilizados para los mapas generalmente están equipados con cuatro tipos de sensores: un GPS (o GNSS) y una unidad de medición de inercia (IMU), que determinan la posición y orientación del vehículo; una cámara; y un escáner láser LIDAR, que mide distancias registrando el tiempo que tarda el rayo láser en viajar del escáner al objeto y viceversa.
Un dispositivo híbrido miniaturizado
Hasta hace poco, los escáneres láser LIDAR podían pesar hasta 10 kilos. El laboratorio Topo, junto con Helimap System SA de spin-off de EPFL, fueron pioneros en el desarrollo de sistemas de mapeo aéreo con helicópteros, que pueden transportar equipos pesados como un escáner LIDAR y una IMU de grado de navegación. Pero en los últimos años, tanto los profesionales de la industria como los investigadores se han centrado en hacer que estos dispositivos de medición sean mucho más pequeños. Cledat pudo hibridar los datos adquiridos por sensores miniaturizados incrustados en un dron (un GNSS, LIDAR, IMU y cámara) de modo que el mapa resultante es casi tan preciso como los obtenidos con un helicóptero. Una técnica de mapeo basada en drones es una alternativa más ecológica y una más adecuada para terrenos difíciles de alcanzar.
Como parte de su tesis, Cledat calibró cuidadosamente cada sensor para que sean lo más efectivos y confiables posible. Para hacer esto, utilizó los campos de calibración del laboratorio cerca de Vufflens-la-Ville en el cantón de Vaud. Obtuvo el premio ISPRS por su trabajo en la calibración de la cámara. El software de ajuste de paquete que desarrolló se utiliza para verificar las mediciones para corregirlas todas simultáneamente. Esto da como resultado una imagen precisa del área y de la posición y orientación del dron. El software de Cledat se desarrollará más en el laboratorio como parte de otro proyecto de tesis.
En la continuidad de su carrera, el investigador quiere recopilar datos sobre el retorno del suelo. Ayudar a las personas que no se atreven a andar en bicicleta en la ciudad. Al equipar una bicicleta con sensores en miniatura adaptados para drones y complementarlos con sensores de ruido y calidad del aire, quiere mapear el tráfico urbano y cuantificar los riesgos potenciales a los que están expuestos los ciclistas, a fin de adaptar campañas específicas de infraestructura vial y prevención en el oeste Lausana
Referencias:
- Emmanuel Cledat, «Sobre el ajuste, la calibración y la orientación de la fotogrametría de drones y el escaneo láser», tesis bajo la supervisión de Jan Skaloud y Davide Antonio Cucci, EPFL, mayo de 2020. Mapas
- Emmanuel Cledat, Davide Antonio Cucci, Jan Skaloud, «Modelos y métodos de calibración de cámaras en el mapeo de corredores con UAVs», ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XLIII, 2020. Mapas
- Cledat, J. Skaloud, «Fusión de fotos con escaneo láser en el aire», ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XLIII, 2020.
- Cledat, D. A. Cucci, «Mapeo de entornos restringidos GNSS con un tándem de drones y control de posición indirecta», ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, vol. IV-2 / W3, págs. 1-7, 2017.
Artículo relacionado: Un futuro con “drones sociales”
